收藏
收藏

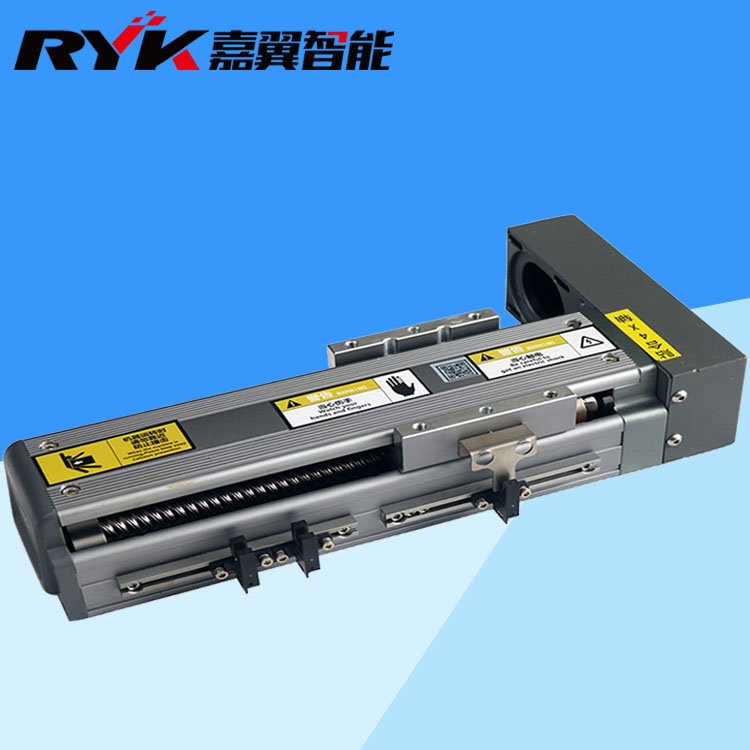
FC-99工业机器人多功能实训台

一、产品概述
工业机器人实训平台,以关节型六轴串联工业机器人为核心, 在操作平台的四周合理分布有多种不同工艺应用的实训模块,包含了搬运码垛工艺、分拣工艺、抛光打磨工艺、装配工艺、焊接工艺等工业机器人最典型应用,不仅满足了职业院校不同专业学生针对工业机器人的操作和编程的教学需求,完全来源于工业应用现场的特征也使该工作站更加适合于作为职业技能竞赛平台。
二、产品组成
1、ABB工业机器人 1 台;
2、组成:机器人模块、实训模块、控制模块等;
3、平台采用模块化设计,实训功能可自主搭配,能够完成工业机器人认知与操作,运行轨迹操纵,程序数据及设定等示教编程。
4、实验室安全管理系统软件参数要求(正版软件,投标文件中提供著作权证书原件和现场演示)
(1)该系统集成无线远程实验台电源管理系统,通过手机或其他移动终端系统监控查询学生实验台的电源开关状态;单独开启关闭学生实验台电源;全部开启或全部关闭实验台电源功能;定时预约实验台电源开启关闭功能。
(2)在WiFi连接状态,教师通过手机APP,可实时高速读取实训台的电流、电压值、功率因数等参数;实时显示设备使用功率和历史曲线,实时监控设备的运行状态、故障预警和异常报警。
(3)验台保护电压和电流,当输入电压或者电流超过保护电压值或者保护电流值自动切断实验台电源保护设备,并推送信息到教师控制端。
三、系统配置
序号 | 设备名称 | 主要参数 |
1. | 实验台 | 外形尺寸:1580*885*1400 实验台由钣金柜体与工业铝材搭建的面板组成,机器人固定在行程面板及方钢上,保证了机器人安装的稳固度。铝材面板可方便的实现实验模块的调整,及自由搭配。实验桌采用抽屉及两侧开门的方式,大大提高了机器人控制器及相关线路安装调试的方便。有利于学生更好的了解机器人的组成。 |
2. | ABB工业机器人 | 具有6个自由度,串联关节型工业机器人,最大的工作半径为580mm,有效负载3kg,重复定位精度±0.01mm,机器人本体重量25kg,第1轴工作范围为-165~ 165°,最大旋转速度330°/s,第2轴工作范围为 110°/-110°,最大旋转速度220°/s,第3轴工作范围为-90~ 70°,最大旋转速度160°/s,第4轴工作范围为-160~ 160°,最大旋转速度320°/s,第5轴工作范围为-120~ 120°,最大旋转速度240°/s,第6轴工作范围为-400~ 400°,最大旋转速度800°/s。工业机器人示教器及驱控一体机。 |
3. | 操作面板模块 | 操作面板由钥匙开关、电源总开关、电压指示表头、PLC单元、变频器单元、电源插座以及航空插头等组成。采用抽屉式安装,保证了整体的美观。 |
4. | 放料平台模块 | 由9宫格组成,通过3种类型物料组成,实现物料搬运存储功能。平台采用铝件加工本色氧化,铝型材搭建,可实现自由安装。 |
5. | 码垛仓库模块 | 码垛平台由方形码垛、圆形码垛组成。平台采用铝件加工本色氧化,铝型材搭建,可实现自由安装。 |
6. | 流水线模块 | 包含FR-D720S-0.4KW变频器1台、三相减速电机1台、到位传感器1只、传送带1套,实现物料传送类等功能 |
7. | TCP 及换装架模块 | 配置3套快速换装工具,分别为吸盘工具、TCP校验笔、气动夹具,及TCP校验 点组成。平台采用铝件加工本色氧化,铝型材搭建,可实现自由安装。 |
8. | 几何轨迹模块 | A4纸大小,模板上有矩形,三角形,圆,五角星,菱形,弧线等。 |
9. | 抛光打磨模块 | 模拟工厂比较通用的打磨砂轮、抛光砂轮、打磨皮带等打磨工艺。实现模拟打磨抛光等功能。 |
10. | 翻转架模块 | 包含焊接平台、旋转装置,模拟工厂焊接工艺,流程等,可通过编程实现角度-340°到 340°任意角度定位。平台上配置部分模拟工件,用于实现实训功能。 |
11. | 3D轨迹模块 | 模块采用优质不锈钢材质制作完成。可实现平面和空间的轨迹实验。 |
12. | 触摸屏模块 | 7寸真彩触摸屏组成。 |
13. | PLC 控制系统 | 西门子S7-1214C,输入14点输出10点/数字输出模组SB1222 DC 200KHz |
14. | 教学资源 | 配套说明书,PLC编程软件及相关源程序。 |
15. | 智能视觉系统 | 视觉控制器:FZ-350 |
视觉相机:ZFX-SC10 | ||
镜头 | ||
相机连接线,及并行通讯线 | ||
显示器 | ||
光源 |
四、产品功能:
1、完成产品输送、分拣、码垛,产品轨迹模拟、模拟焊接、模拟打磨、TCP 校点等工作;
2、主要实训内容:机器人认知、机器人手动操纵、查看机器人信息、机器人数据的备份与恢复、机器人 I/O 通信、机器人的硬件连接、PLC 控制、气源装置及气缸、电磁阀控制、机械手手动控制、上料模块的装调与操控、装配模块的装调与操控、机器检测模块的装调与操控、喷涂模块的装调与操控、光电传感器检测及调整、码垛模块的装调与操控、机器人轨迹运动模块装调。
3、平台配置模拟仿真软件,学生在电脑上进行模拟编程,验证程序没有错误在下载到机器人运行。
4、此基础工作站以三种工件装配为一款产品为前提,通过来料来料储存单元在芯片组装机构实现物料组装,然后通过输送装置输出到后续工序。
五、配套软件
1、工业4.0仿真实训软件软件采用三维建模基于虚拟现实技术的计算机仿真模拟技术,可以进行PLC电气控制仿真、电工电子仿真、气动仿真、液压仿真、传感器仿真等工业常用技术仿真
1)PLC仿真可以通过PLC编程控制模型的相应动作从而完成工序动作包含机械手仿真、自动门仿真、升降机仿真、分拣仿真、正反转仿真、邮件分拣、流水线、自动分拣等。
2)电工电子仿真
(1)接线仿真(2)电路仿真(3)排故仿真(4)原理仿真(5)电机拆装仿真,三相异步机拆分、单相